
Az Open Drone Map fotogrammetriai szoftverről korábbi írásunkban olvashattál. Az említett blogcikkünkben az Open Drone Map telepítésére tértem ki és alapbeállításokon megmutattam, hogy milyen térképeket és 3D modelleket lehet létrehozni.
Jelenlegi cikkünk megírásához számos Open Drone Map fórumot és leírást áttanulmányoztam, hogy kiderítsem, mik a legjobb beállítások, ha térképről vagy 3D modellről van szó.
Mielőtt belevágunk, mindenképp fontos megemlíteni, hogy az Open Drone Map sem „csodaszoftver”! Csak akkor tud kiváló minőségű térképeket és 3D modelleket gyártani, ha az input adatok, azaz a drónos fényképek is megfelelően jók:
- Minimum 5 fénykép szükséges a rekonstrukcióhoz;
- Legalább 65%-os átfedés szükséges a képek között;
- A legjobb minőségű 3D modellekhez és térképekhez ~85%-os átfedést kell biztosítanod.
Ha érdekel a teljes folyamat és némi háttértudást is szeretnél, akkor a következő sorrendben olvasd el a cikkeinket:
- Ismerd meg a fotogrammetriát: térképek és 3D modellek!
- GPS, GNSS, RTK, PPK – helymeghatározási eljárások a légi fotogrammetriában
- 3 tipp földi fotogrammetriai felvételezéshez
- 3 lépés drónos fotogrammetriai repülési tervhez
- 5 tipp fotogrammetriai felszínkövető térképezéshez
- Így készíts 3D modelleket digitális fényképekből!
- Térképek és 3D modellek drónos képekből
A fotogrammetriai felmérés kimeneti fájljai nagyméretű pontfelhők, ortomozaikok, digitális magasságmodellek (DEM) és 3D modellek lehetnek. Ezeket nehéz lehet megosztani az ügyféllel és a kollégákkal, ezért erősen ajánlott a SurveyTransfer adatmegosztó szoftver használata! További információkért keresd fel a szoftvergyártó weboldalát IDE kattintva.
Most Már elindíthatod az Open Drone Map-et – TÉRKÉP BEÁLLÍTÁSOK
Az Open Drone Map által generált térképek közül az ortofotó-mozaikokat és felszín modelleket vizsgáljuk meg részletesebben. A beállítások során összevetettem a fórumokon összegyűjtött tapasztalati információkat és az Open Drone Map alapbeállításait.
Emlékeztetőül: Egy projekt kialakítása, és a fényképek feltöltése után a beállításokat az „Options” rész melletti „Edit” gombra kattintva éred el.
A felhasználók által összegyűjtött információk által a következő beállításokat érdemes használni:
auto-boundary: true, dem-resolution: 2, dsm: true, dtm: true, mesh-octree-depth: 12, mesh-size: 300000, min-num-features: 13000, orthophoto-resolution: 1.5, pc-quality: high, use-exif: true
Mindezekből a mesh-size, mesh-octree-depth (max 14) mérete tovább növelhető és a dem-resolution, valamint orthophoto-resolution értéke tovább csökkenthető. A pontfelhő minősége (pc-quality) igény szerint átállítható ultra kategóriára. Ha az értékeket megváltoztatod, nem feltétlenül fogsz elérni jelentős minőségbeli javulást, viszont cserébe megnő a számítás hardverigénye és a feldolgozási idő is.
A felhasználói visszajelzéseken alapuló beállítások használatát a képek bal felső sarkában „MAP (manual)” felirattal jeleztem, míg az Open Drone Map „Default” beállításainak eredményeit „MAP (default)” elnevezéssel jelöltem.
A cikk megírásához egy Intel Core i9-10900F CPU 2.81 GHz; 16 GB RAM; Radeon RX 570 GPU 4GB GDDR5 specifikációkkal rendelkező PC-t használtam, tehát a CPU teljesítményét akartam kihasználni. A tesztek alatt 179 képet használtam fel. Az Open Drone Map „Default” beállításaival 29 perc alatt készültek el a térképek, míg az általam megadott értékekkel a feldolgozás 35 percbe telt.
Lássuk az eredményeket!
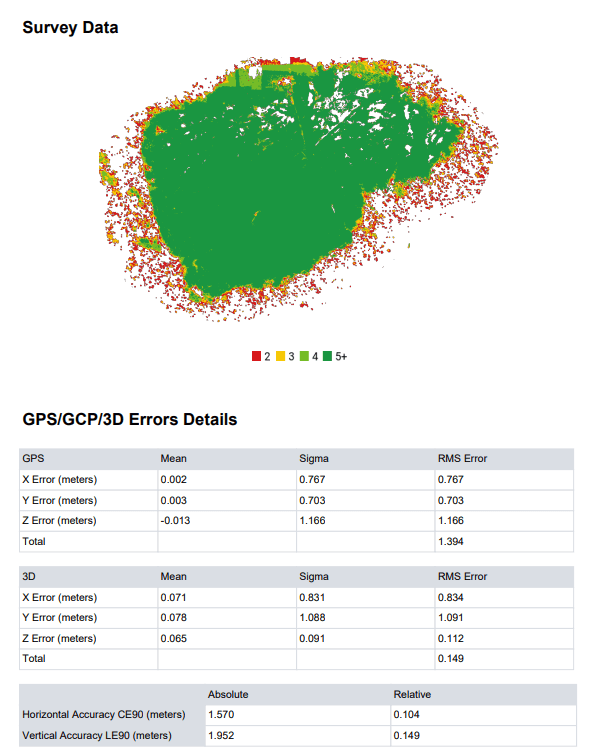
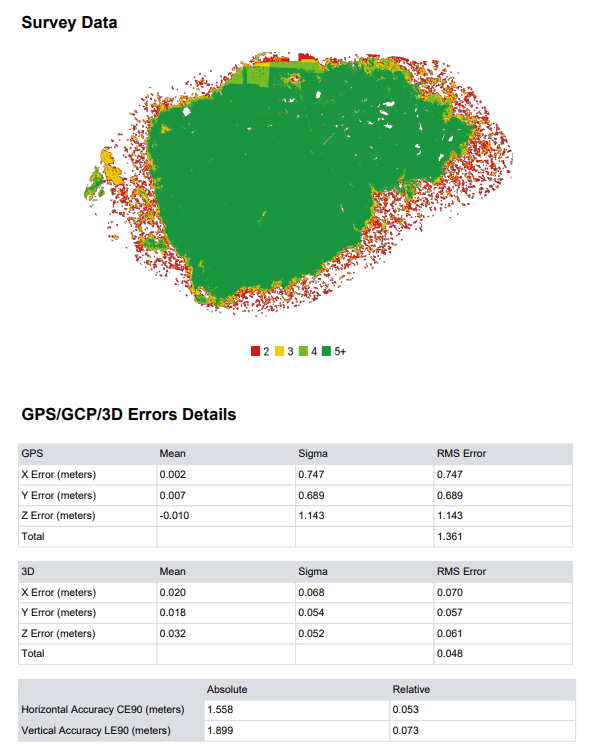
A megjelenő eredményeken jól látszik, hogy a felhasználók által javasolt beállítások pontosabb eredményt hoztak és az ortofotó-mozaik eredménye is szemmel láthatóan jobb lett. Fontos megjegyezni, hogy a DSM (Digital Surface Model) esetében az alapbeállítás valósághűbb eredményt produkált. Ez legjobban a főépülettől északnyugatra látható kis fahíd rajzolatán látszódik. A híd geometriája szinte tökéletes alapbeállításon, míg az átállított értékek esetében a tereptárgy fele egybeolvad az árokkal.
OPEN DRONE MAP – 3D MODELL BEÁLLÍTÁSOK
Az előző, térképeket taglaló fejezethez hasonlóan, itt is az Open Drone Map által előre felkínált „3D Model” beállításait vetem össze a felhasználói visszajelzésekkel („3D Manual”).
A felhasználók tapasztalatai alapján a következő beállítások javasoltak:
auto-boundary: true, feature-quality: ultra, mesh-octree-depth: 12, mesh-size: 300000, min-num-features: 13000, pc-quality: ultra, use-3dmesh: true
A beállításokban különösen fontos paraméter a mesh-octree-depth, ugyanis ez a változó felel azért, hogy a Poisson Reconstruction algoritmus a pontfelhőben milyen renderelési szintig menjen el és számoljon a 3D modell hálóelemeinek létrehozásakor. A paraméter konyhanyelven megfogalmazva annyit takar, hogy mennyire legyen részletes a pontfelhőből visszafejtett 3D modell. Ennek az értéke maximálisan 14 lehet, de a visszajelzések alapján 12 fölé menni nem annyira érdemes.
Az Open Drone Map „3D Model” beállításokkal a feldolgozás 32 percig futott, míg az általam megadott paraméterekkel (“3D manual”) a rekonstrukció 39 percet vett igénybe.
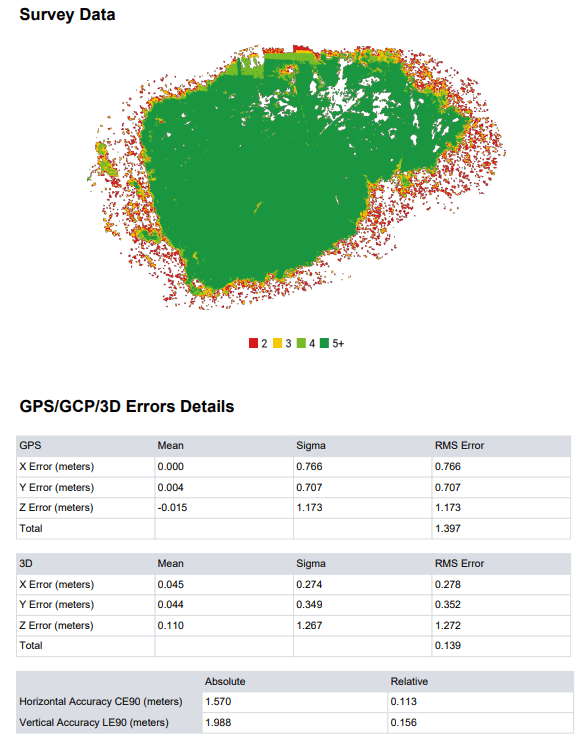
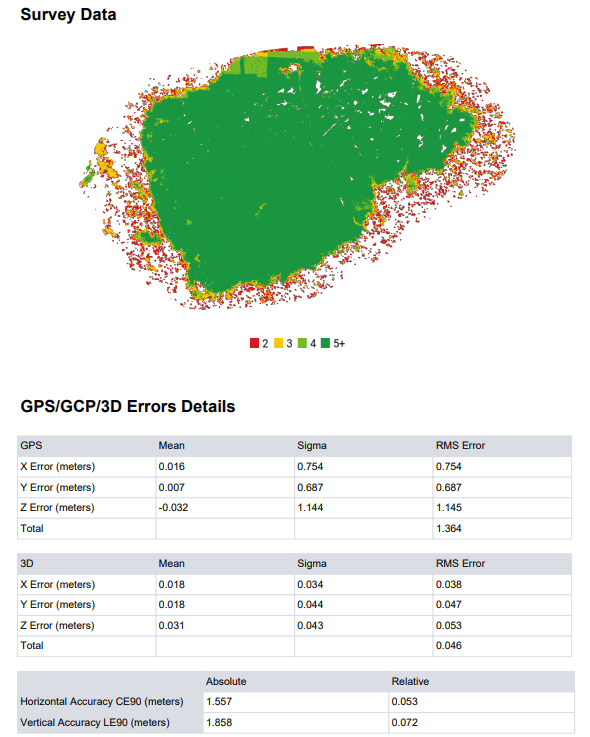
Jól látható, hogy a felhasználók visszajelzései alapján a 3D modellek pontosabbak és részletgazdagabbak is lettek. Ez legjobban az épület oldalfalainál látszódik, hiszen a felhasználók tanácsait beépítve a modellben nem képződik adathiányos térrész. A 3D esetében teljesen egyértelmű, hogy érdemes kipróbálni a felhasználók által javasolt beállítási lehetőségeket!
AZ OPEN DRONE MAP ÁLTAL GENERÁLT TÉRKÉPEK ÉS 3D MODELLEK TOVÁBBI FELHASZNÁLÁSA
Ha magadnak telepítetted az Open Drone Map-et – ahogy azt ebben a cikkben bemutattam –, akkor sajnos szembesülsz azzal a ténnyel, hogy az Open Drone Map eredményeit nem tudod megosztani senkivel, mivel az lokálisan fut a számítógépeden. Minél több, jobb felbontású drónos fényképed van, és minél jobb feldolgozási beállításokat használsz, annál nagyobb méretű fájlok készülnek.
Ha nagyon-nagyon tetszett, amit olvastál, akkor meg is oszthatod az ismerőseiddel. Ne fogd vissza magad! 🙂
Tetszett, amit olvastál? Akarsz hasonlókat olvasni?