
You could have read about the Open Drone Map software in our previous article. In the mentioned blog article, I covered the installation of Open Drone Map and showed what kind of maps and 3D models can be created using the basic settings.
To write our current article, I studied many Open Drone Map forums and descriptions to find out what are the best settings when it comes to maps or 3D models.
Before we get into it, it’s definitely important to mention that Open Drone Map is not a “miracle software” either! You can only produce high-quality maps and 3D models if the input data, i.e., drone photos, are also sufficiently good:
- At least 5 images are required for the reconstruction;
- At least 65% overlap between images is required;
- For the best quality 3D models and maps, you need ~85% overlap.
If you are interested in the entire process and want some background knowledge, then read our articles in the following order:
- Get to know photogrammetry: maps and 3D models!
- GPS, GNSS, RTK, PPK – Positioning methods in aerial photogrammetry
- 3 tips for ground photogrammetry surveying
- 3 steps to a drone photogrammetry flight plan
- 5 tips to follow for excellent terrain awareness photogrammetry
- How to create 3D models from digital photos
- Maps and 3D models from drone images
The output files of the photogrammetry survey can be large point clouds, orthomosaics, digital elevation models (DEM) and 3D models. These can be difficult to share with the client and colleagues. It is strongly recommended to use the SurveyTransfer data sharing software! For more information, visit the website of the software manufacturer by clicking HERE.
NOW YOU CAN START OPEN DRONE MAP – MAP SETTINGS
Among the maps generated by Open Drone Map, we examine the orthophoto mosaics and surface models in more detail. I compared the experience gathered on the forums and the basic settings of Open Drone Map.
Reminder: After creating a project and uploading photos, you can access the settings by clicking the “Edit” button next to the “Options” section.
Based on the information collected by users, the following settings should be used:
auto-boundary: true, dem-resolution: 2, dsm: true, dtm: true, mesh-octree-depth: 12, mesh-size: 300000, min-num-features: 13000, orthophoto-resolution: 1.5, pc-quality: high, use-exif: true
Among these the value of mesh-size, mesh-octree-depth (max 14) can be increased further and the value of dem-resolution, and orthophoto-resolution can be reduced further. The quality of the point cloud (pc-quality) can be changed to ultra category if required. If you change the values, you will not necessarily achieve a significant quality improvement, but in return, the hardware requirements of the calculation and the processing time will increase.
I indicated the use of the settings based on user feedback with the inscription “MAP (manual)” in the upper left corner of the images, while the results of the Open Drone Map “Default” settings were marked with the name “MAP (default)”.
To write this article, I used a PC with the following specs: an Intel Core i9-10900F CPU 2.81 GHz; 16 GB of RAM; Radeon RX 570 GPU 4GB GDDR5. Given the specifications, I wanted to take advantage of the CPU performance. I used 179 images during the tests. With the “Default” settings of Open Drone Map, the maps were completed in 29 minutes, while with the values I specified, the processing took 35 minutes.
Let’s see the results!
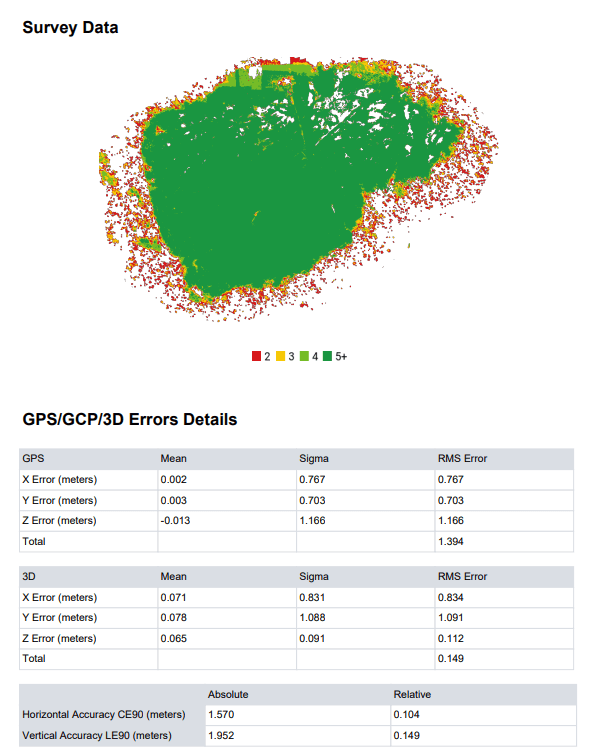
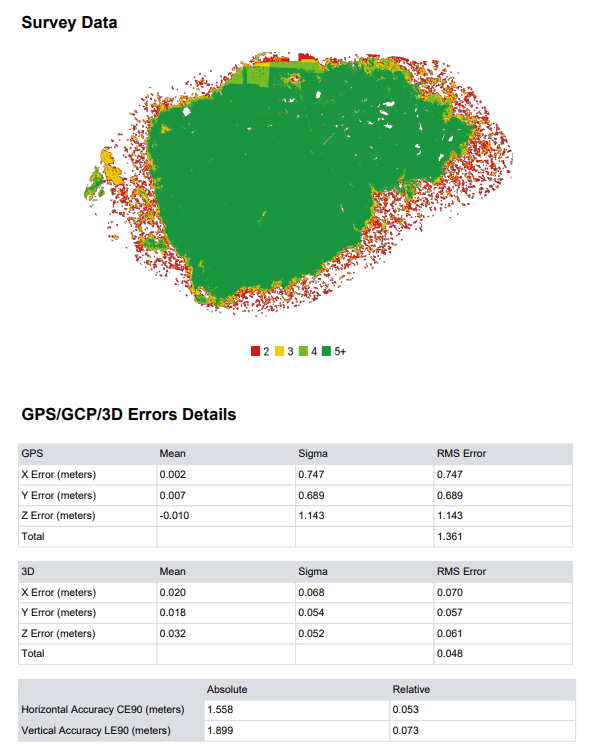
It is clear from the displayed results that the settings suggested by the users produced more accurate results and the orthophoto mosaics were visibly better. It is important to note that for the DSM (Digital Surface Model), the default setting produced a more realistic outcome. This is best seen in the design of the small wooden bridge visible northwest of the main building. The geometry of the bridge is almost perfect in the basic setting, while in the case of the adjusted values, half of the landmark merges with the ditch.
OPEN DRONE MAP – 3D MODEL SETTINGS
Just like in the previous chapter discussing maps, here too I compare the “3D Model” settings offered by Open Drone Map with the feedback of the users (“3D Manual”).
Based on users’ experience, the following settings are recommended:
auto-boundary: true, feature-quality: ultra, mesh-octree-depth: 12, mesh-size: 300000, min-num-features: 13000, pc-quality: ultra, use-3dmesh: true
A particularly important parameter in the settings is mesh-octree-depth because this variable is responsible for the rendering level to which the Poisson Reconstruction algorithm goes in the point cloud and calculates when creating the mesh elements of the 3D model. In very simple terms, the parameter covers how detailed the 3D model derived from the point cloud should be. The maximum value of this can be 14, but based on the feedback, going above 12 is not so worthwhile.
With the Open Drone Map “3D Model” settings, the processing took 32 minutes, while with the parameters I specified (“3D manual”), the reconstruction took 39 minutes.
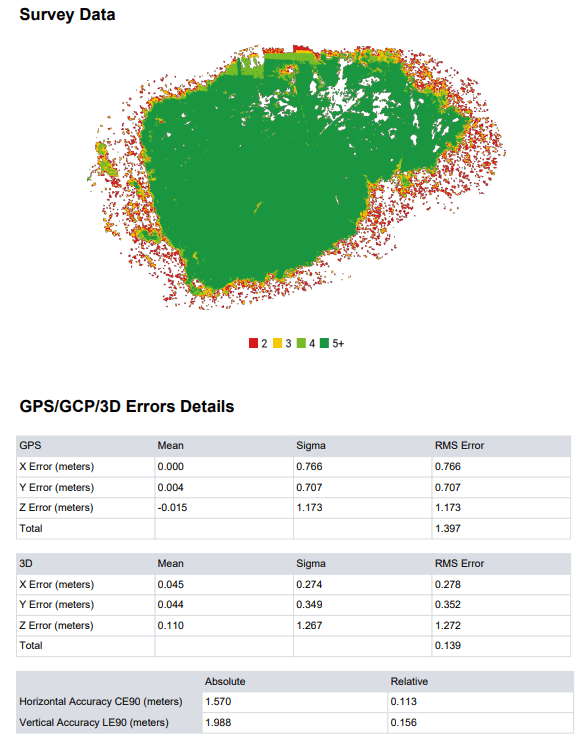
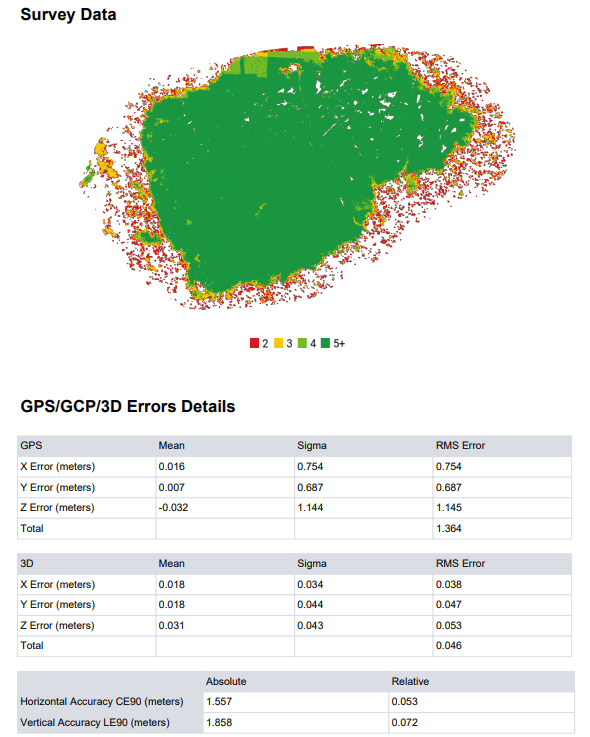
Based on the users’ feedback, the 3D models have become more accurate and detailed. This is best seen on the side walls of the building, since by incorporating the users’ advice, the model does not create a space with missing data. In the case of 3D, it is quite clear that it is worth trying the setting options suggested by users!
If you installed the Open Drone Map yourself – as I presented in this article – then you will unfortunately be faced with the fact that you cannot share the results of Open Drone Map with anyone, as it runs locally on your computer. The more high-resolution drone photos you have and the better processing settings you use, the larger the file sizes will be. More high-resolution drone photos and better processing settings result in larger files.
If you really liked what you read, you can share it with your friends. 🙂
Did you like what you read? Do you want to read similar ones?